[# DeepSpeed 和 Megatron 的区别和联系
1.1. 总结
| DeepSpeed | DeepSpeed 代表性功能 | Megatron | Megatron 代表性功能 | 备注 | |
|---|---|---|---|---|---|
| GPU 底层优化 | 有 | 开创性的全栈 GPU 内核设计 FP6 量化 | 更牛逼 | Fused CUDA Kernels | Megatron 是 NVIDIA 亲儿子,底层优化信手拈来 |
| 数据并行 | 更牛逼 | Zero 系列的分布式数据并行方案 | 有 | 优化器分片 | Megatron 做了类似 ZERO-1 的优化器分片,但数据并行没有 DeepSpeed 强 |
| 模型并行 | 有 | 更牛逼 | Megatron 的张量并行很牛 |
1.2. Megatron-LM
- Megatron-LM-1: 利用了张量并行和数据并行。
- Megatron-LM-2: 新增了 pipeline 并行——
virtual pipeline: 1F1B-interleaving,成为和 DeepSpeed 类似的 3D 并行的训练框架。 - Megatron-LM-3: 增加了
Sequence Parallelism、Selective Activation Recomputation和Checkpointing Skipping。- Sequence Parallelism: 在 Tensor Parallelism 的基础上,将 Transformer 核的 LayerNorm 以及 Dropout 层的输入按 Sequence Length 维度进行了切分,使得各个设备上面只需要做一部分的Dropout和LayerNorm。
1.3. DeepSpeed
DeepSpeed 实现了三种并行方法(数据并行训练、模型并行训练和流水线并行训练)的灵活组合:零冗余优化起(Zero Redundancy Optimizer, 缩写为 ZeRO)是一种用于大规模分布式深度学习的新型内存优化技术。
ZeRO 作为 DeepSpeed 的一部分,用于提高显存效率和计算效率。 ZeRO 支持的数据并行、流水线并行和张量切片模型并行。 ZeRO 可以克服数据并行和模型并行的局限性,同事实现两者的优点。 通过在数据并行进程之间划分模型状态参数、梯度和优化器状态来消除数据并行进程中的内存冗余,而不是复制它们。
ZeRO 有三个主要的优化阶段,它们对应优化器状态、梯度和参数的划分:
- Pos:减少 4 倍内存,通信量与数据并行性相同
- Pos+g:减少 8 倍内存,通信量与数据并行性相同
- Pos+g+p:内存减少与数据并行度 Nd 呈线性关系。
ZeRO-3 offload 是 ZeRO Stage 3 和 ZeRO offload 相结合的一种高效且易于使用的实施方式。 主要好处是:
- 极高的内存效率,可以在有限的GPU资源上运行非常大的模型;
- 极易使用:扩展到超过一万亿个参数,而不需要以复杂的方式组合多种并行技术;
- 每个GPU的高性能吞吐量和跨GPU的超线性可扩展性,用于分布式训练。
1.4. Megatron-DeepSpeed
176B BLOOM 使用 Megatron-DeepSpeed进行训练,结合了两种技术:
- DeepSpeed: 深度学习优化库,让分布式训练变得简单、高效且有效;
- Megatron-LM: NVIDIA 的应用深度学习研究团队开发的大型、强大的 transformer 模型框架。
DeepSpeed 团队将 DeepSpeed 库中的 ZeRO 分片和流水线并行与 Megatron-LM 中的张量并行相结合,开发了一种基于 3D 并行的方案。
训练 BLOOM 时采用了两个框架的以下组件:
| 组件 | DeepSpeed | Megatron-LM |
|---|---|---|
| ZeRO 数据并行 | 是 | |
| 张量并行 | 是 | |
| 流水线并行 | 是 | |
| BF16 优化器 | 是 | |
| CUDA 融合核函数 | 是 | |
| DataLoader | 是 |
Megatron-LM 和 DeepSpeed 都有流水线并行和 BF16 优化器实现,但我们使用 DeepSpeed 的实现,因为它们集成了 ZeRO。
Megatron-DeepSpeed 实现了 3D 并行以允许大模型以非常有效的方式进行训练。
- 数据并行(Data Parallelism, DP): 相同的设置和模型被复制多份,每份每次都被馈送不同的一份数据。处理是并行完成的,所有份在每个训练步结束时同步。
- 张量并行(Tensor Parallelism, TP): 每个张量被分成多个块,因此张量的每个分片都位于其指定的 GPU 上,而不是让整个张量驻留在单个 GPU 上。在处理过程中,每个分片在不同的 GPU 上分别并行处理,结果在步骤结束时同步。这就是所谓的水平并行,因为是做的水平拆分。
- 流水线并行(Pipeline Parallelism, PP): 模型在多个 GPU 上垂直(即按层)拆分,因此只有一个或多个模型层放置在单个 GPU 上。每个 GPU 并行处理流水线的不同阶段,并处理 batch 的一部分数据。
- 零冗余优化器(Zero Redundancy Optimizer, ZeRO):执行与 TP 类似的张量分片,但整个张量会及时重建以进行前向或反向计算,因此不需要修改模型。还支持各种卸载技术以补偿有限的 GPU 内存。
1.4.1. 数据并行
在该方法中,模型被完全复制到每个 GPU,然后在每次迭代后所有模型相互同步各自的状态。 这种方法可以通过投入更多 GPU 资源的方式加快训练速度,解决问题。 但它有个限制,即只有当模型能够放进单个 GPU 时才有效。
1.4.2. ZeRO 数据并行
ZeRO 数据并行就是通常的 DDP,只是没有每个 GPU 都复制完整的模型参数、梯度和优化器状态,而是每个 GPU 只存储其中的一部分。 在随后的运行过程中,当需要给定层的完整层参数时,所有 GPU 同步以相互提供它们缺失的部分。
该组件由 DeepSpeed 实现。
1.4.3. 张量并行
在张量并行中,每个 GPU 仅处理张量的一部分,并且仅当某些算子需要完整的张量时才触发聚合操作。
Transformer 类模型的主要模块为:一个全连接层nn.Linear,后面跟一个非线性激活层GeLU。
基于权重矩阵按列拆分,随后的 GEMM 按行拆分方案,可以更新任意深度的 MLP,只需在每个拆列-拆行序列之后同步 GPU。
需要特别考虑的是: 由于前向和后向传播中每层都有两个 all reduce,因此 TP 需要设备间有非常快速的互联。 因此,除非你有一个非常快的网络,否则不建议跨多个节点进行 TP。
该组件由 Megatron-LM 实现。 Megatron-LM 最近扩展了张量并行能力,新增了序列并行的能力,用于难以使用前述切分算法的算子,如 LayerNorm。
1.4.4. 流水线并行
朴素流水线并行是将模型各层分组分布在多个 GPU 上,并简单地将数据从 GPU 移动到 GPU。
该机制相对简单-将所需层用.to()方法绑到相应设备,现在只要数据进出这些层,这些层就会将数据切换到与该层相同的设备,其余部分保持不变。
这其实就是垂直模型并行。 例如,如果下图显示一个 8 层模型:
=================== ===================
| 0 | 1 | 2 | 3 | | 4 | 5 | 6 | 7 |
=================== ===================
GPU0 GPU1
当数据需要从第 3 层传到第 4 层时,它需要从 GPU0 传输到 GPU1,这会引入通信开销。 如果参与的 GPU 位于同一计算节点 (例如同一台物理机器) 上,则传输非常快,但如果 GPU 位于不同的计算节点 (例如多台机器) 上,通信开销可能会大得多。
问题
- 该方法为什么被称为 朴素 流水线并行呢,它又有什么缺陷呢?主要是因为该方案在任意给定时刻除了一个 GPU 之外的其他所有 GPU 都是空闲的。
- 共享嵌入可能需要在 GPU 之间来回复制。作者使用的流水线并行(PP)与上述朴素 PP 几乎相同,但它解决了 GPU 闲置问题,方法是将传入的 batch 分块为 micros batch 并人工创建流水线,从而允许不同的 GPU 同时参与计算过程。
1.4.5. DP + PP
DeepSpeed 流水线 并行教程 中有一张图演示了如何将 DP 与 PP 结合起来,如下所示:
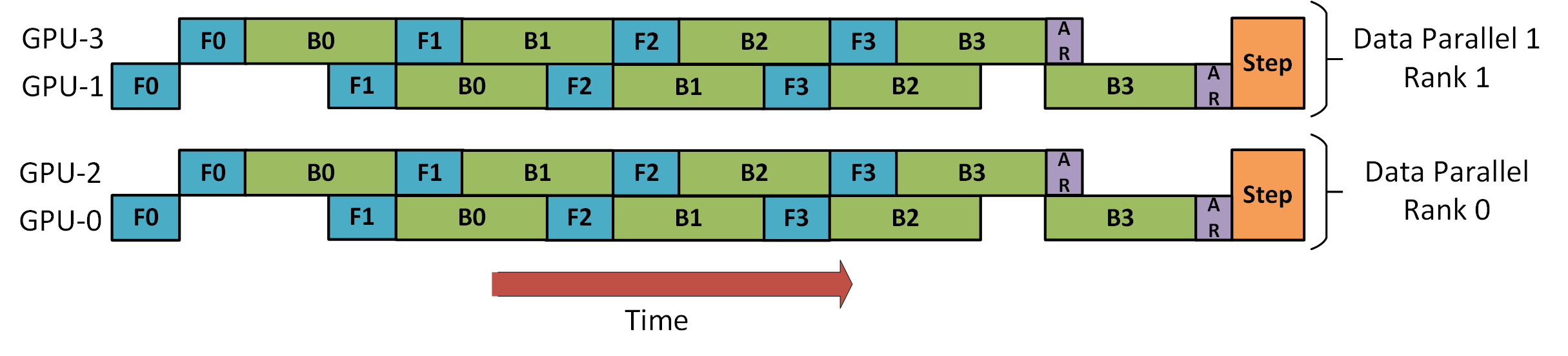
DP rank 0 是看不见 GPU2 的, DP rank 1 是看不到 GPU3 的。对于 DP 而言,只有 GPU 0 和 1,并向它们馈送数据。GPU0 使用 PP “秘密地” 将它的一些负载卸载到 GPU2。同样地, GPU1 也会得到 GPU3 的帮助。
由于每个维度至少需要 2 个 GPU,因此这儿至少需要 4 个 GPU。
1.4.6. DP+PP+TP
将 PP、TP 和 DP 相结合,称为 3D 并行,如下图所示:
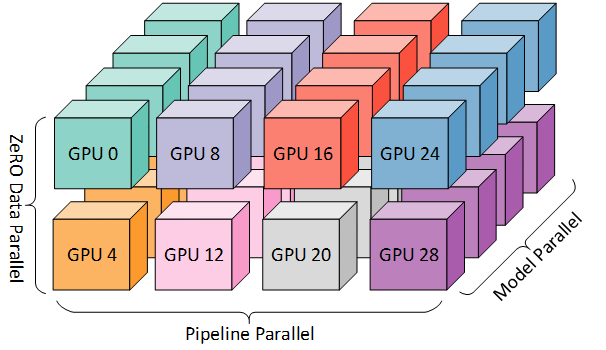
由于每个维度至少需要 2 个 GPU,因此在这里你至少需要 8 个 GPU 才能实现完整的 3D 并行。
1.4.7. ZeRO DP+PP+TP
DeepSpeed 的主要功能之一是 ZeRO,它是 DP 的超级可伸缩增强版。 通常它是一个独立的功能,不需要 PP 或 TP。但它也可以与 PP、TP 结合使用。
- ZeRO-DP 与 PP(以及 TP)结合时,通常只启用 ZeRO 阶段 1,只对优化器状态进行分片。
- 由于 PP,层数已经比正常情况下少,因此不会节省很多内存。PP 已经将梯度大小减少了
1/pp,因此在此基础上的梯度分片和纯 DP 相比节省不了多少内存。
1.4.8. BF16 Optimizer
用 FP16 训练大型 LLM 模型是一个禁忌。 BF16 格式的关键是它的指数位数与 FP32 相同,因此不会溢出,但 FP16 经常溢出! FP16 的最大数值范围为 64k,您只能进行较小数的乘法。 例如你可以做 250250=62500,但如果你尝试 255255=65025,你就会溢出,这是导致训练出现问题的主要原因。 这意味着你的权重必须保持很小。 一种称为损失缩放 (loss scaling) 的技术有助于缓解这个问题,但是当模型变得非常大时,FP16 较小的数值范围仍然是一个问题。
无论使用 BF16 还是 FP16,都有一个权重副本始终在 FP32 中——这是由优化器更新的内容。 因此 16 位格式仅用于计算,优化器以全精度更新 FP32 权重,然后将它们转换为 16 位格式以用于下一次迭代。
References: